
AE Robot Controller Software(ARCS)
It integrates bus protocol conversion, AR language compilation system, robot kinematics, dynamics algorithm, human-machine interface and other modules.
It has the maximum 48-axis linkage control, covers a variety of compensation algorithms and has an absolute positioning precision of ±0.1 mm.
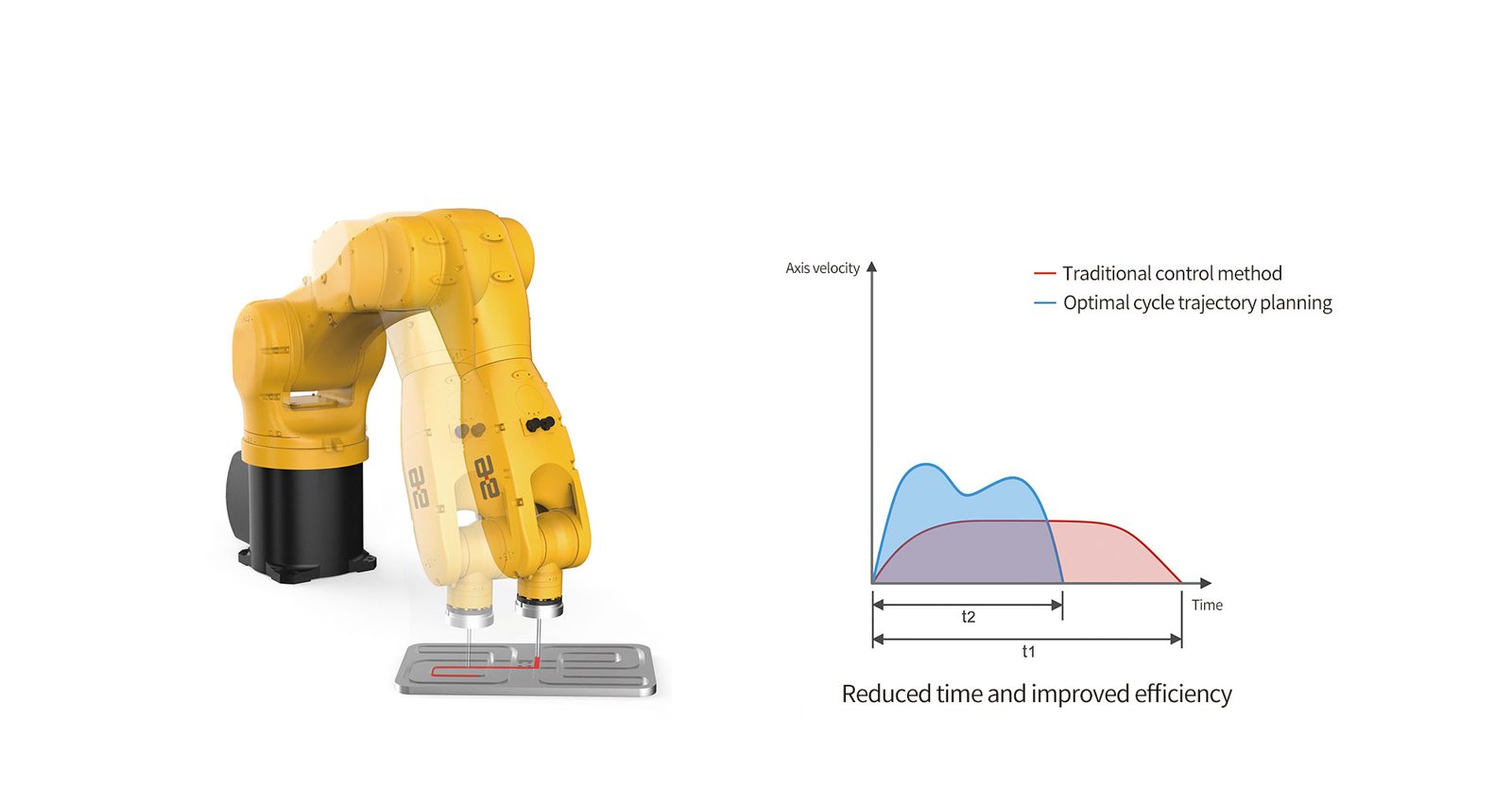
Time-optimal Trajectory Planning
Each axis can achieve the shortest cycle under the constraints of velocity, acceleration, jerk and torque.
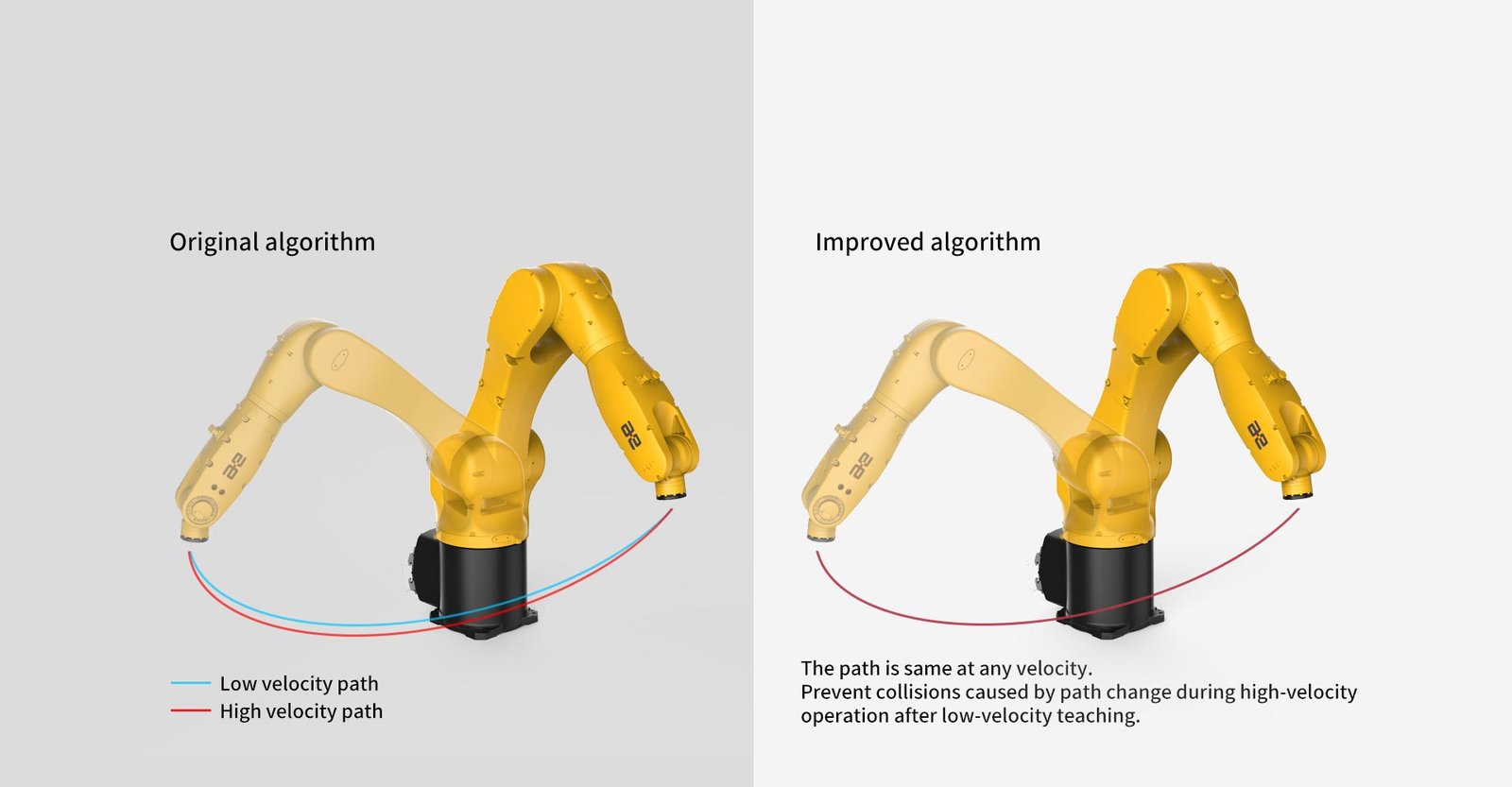
Absolute path keeping
It can always guarantee that the actual trajectory is highly consistent with the teaching trajectory.
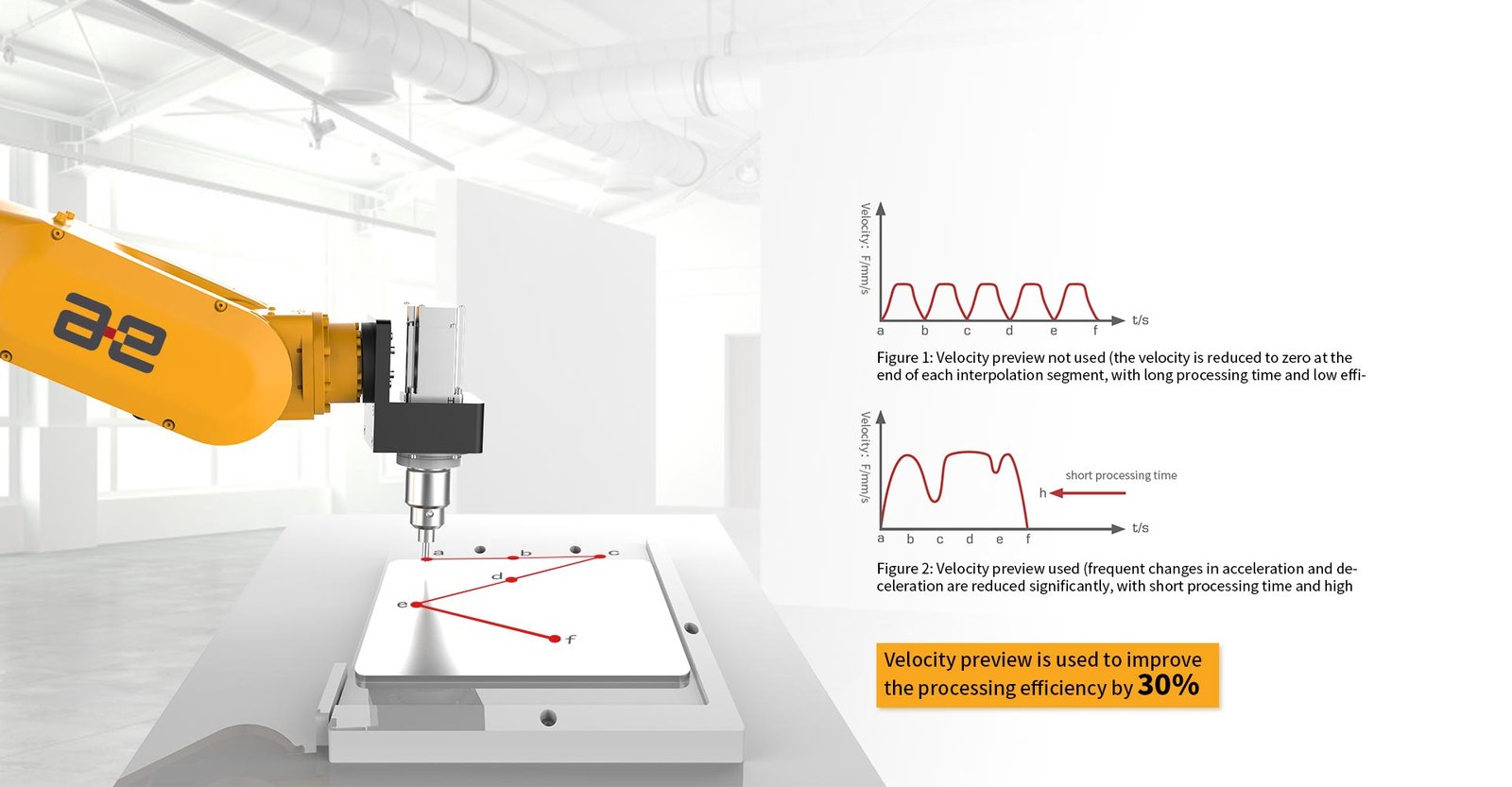
Speed Forward-Looking
Detect trajectory inflection points in advance and perform speed planning to achieve high-speed smooth transition.
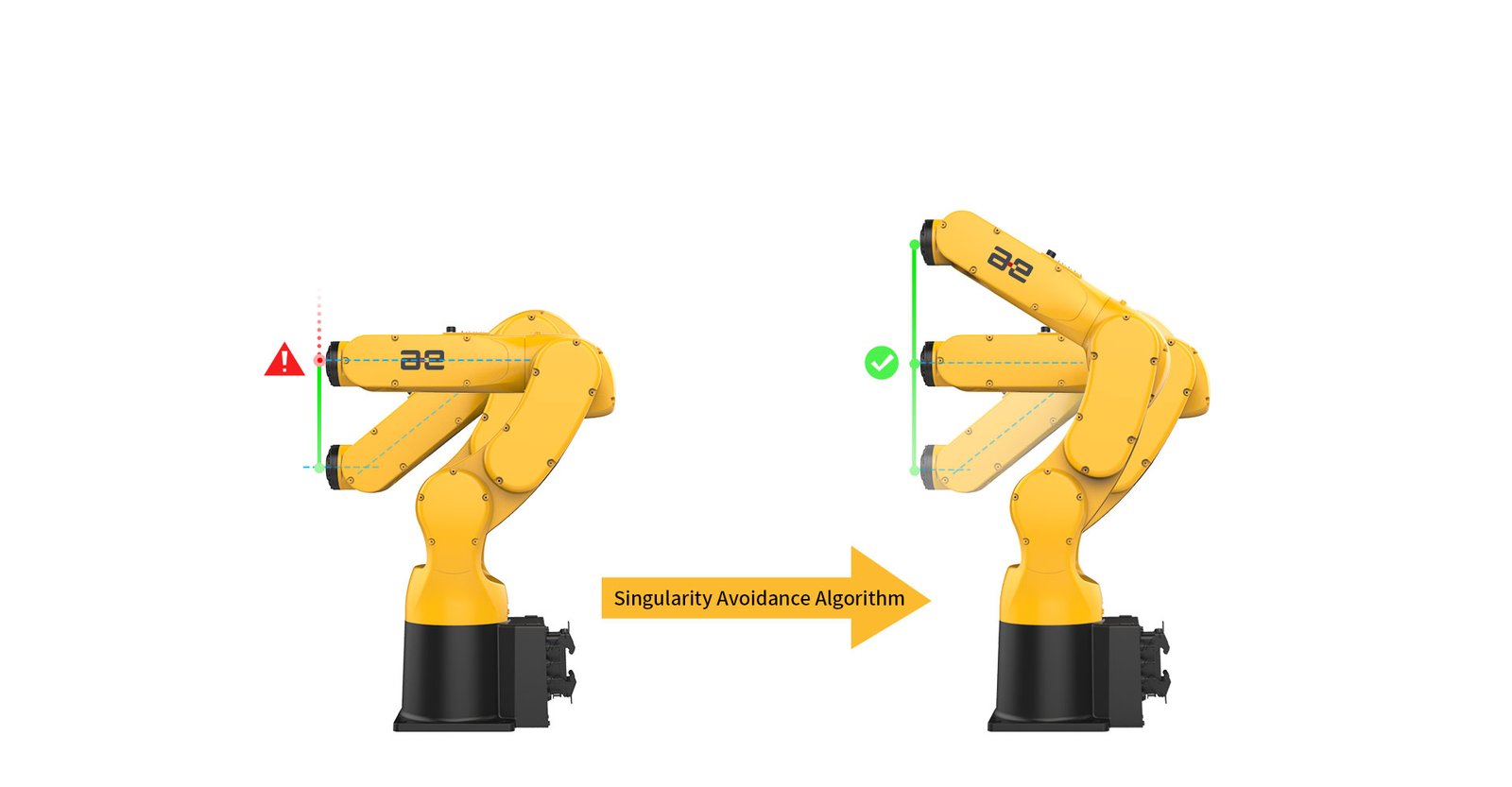
Wrist singularity avoidance algorithm
It can solve the problem of excessive joint velocity around the singularity of the wrist.

Collision detection
The feedback data of motor current and torque can be collected to reduce the collision damage, ensuring safety of both human and machine.

Hand Guiding Function
Robot can be towed manually to reach the specified position or move along a specific trajectory to complete the teaching programming.
Save training and programming time, improve production efficiency, and reduce robot use costs.
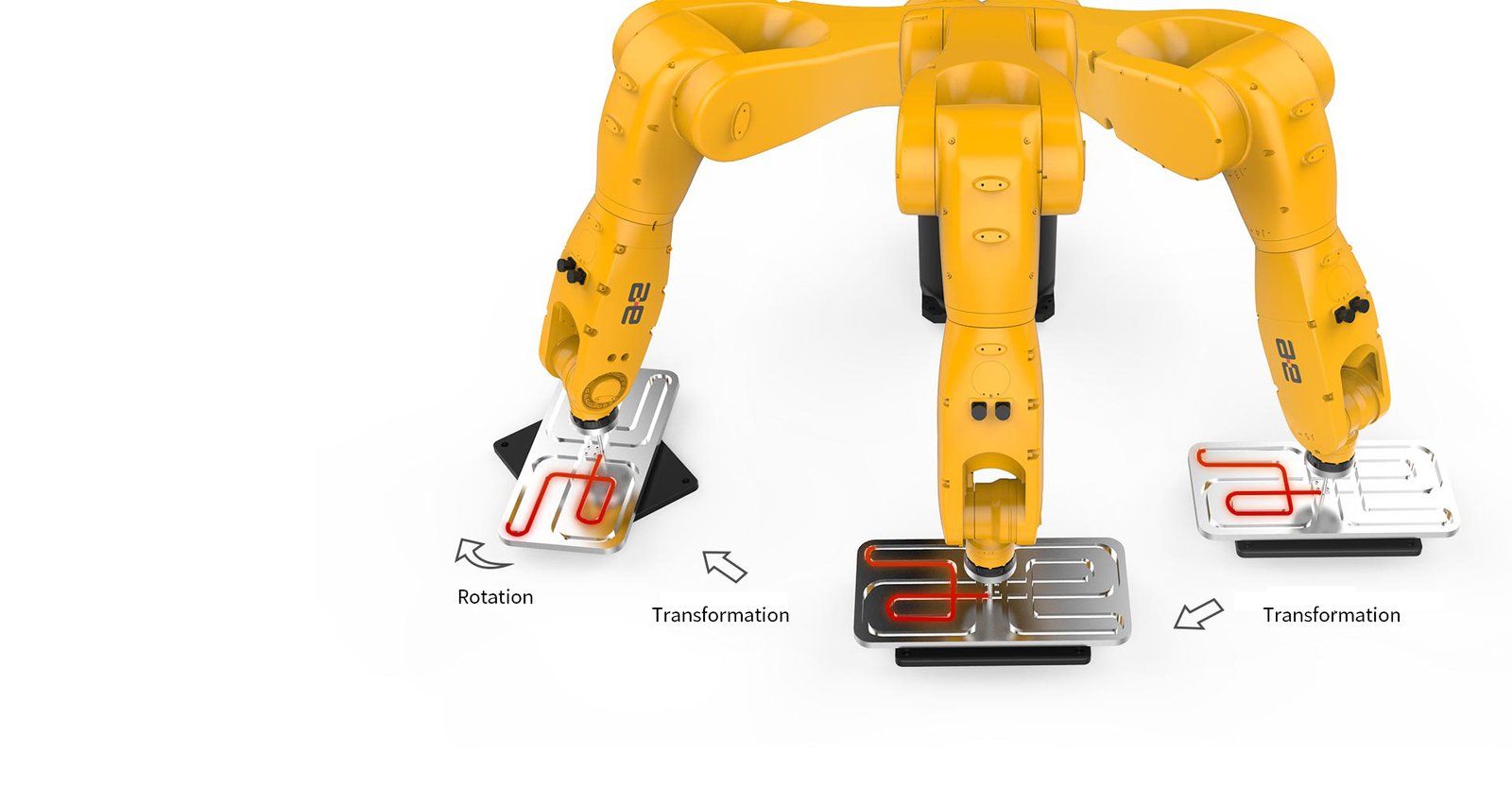
Trajectory translation and rotation
Copy the trajectory to new position through trajectory translation and rotation, reducing the workload of teaching.
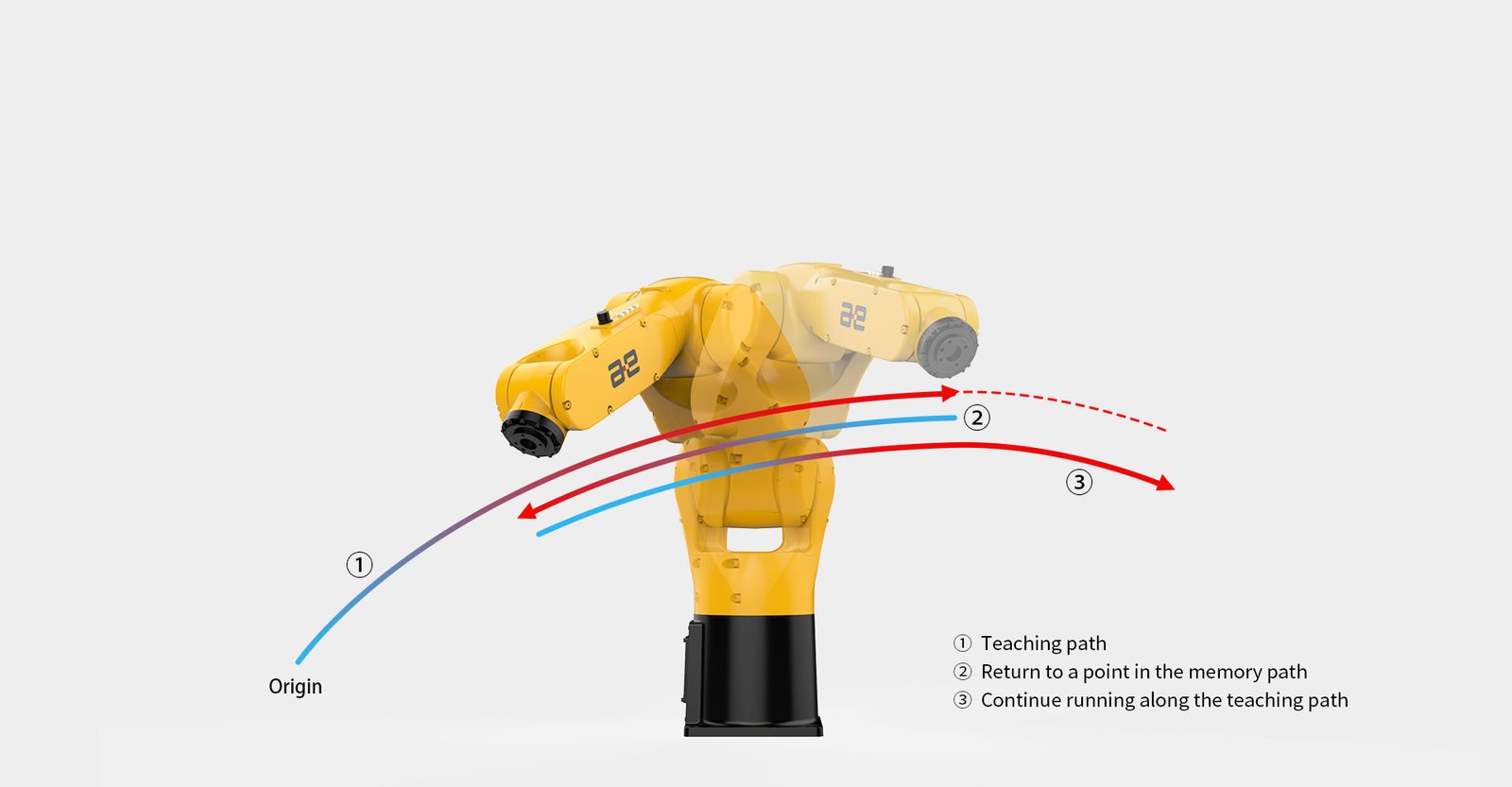
Trajectory record
Record the TCP trajectory to solve the problem of the robot deviating from the original teaching path after pause and restart.
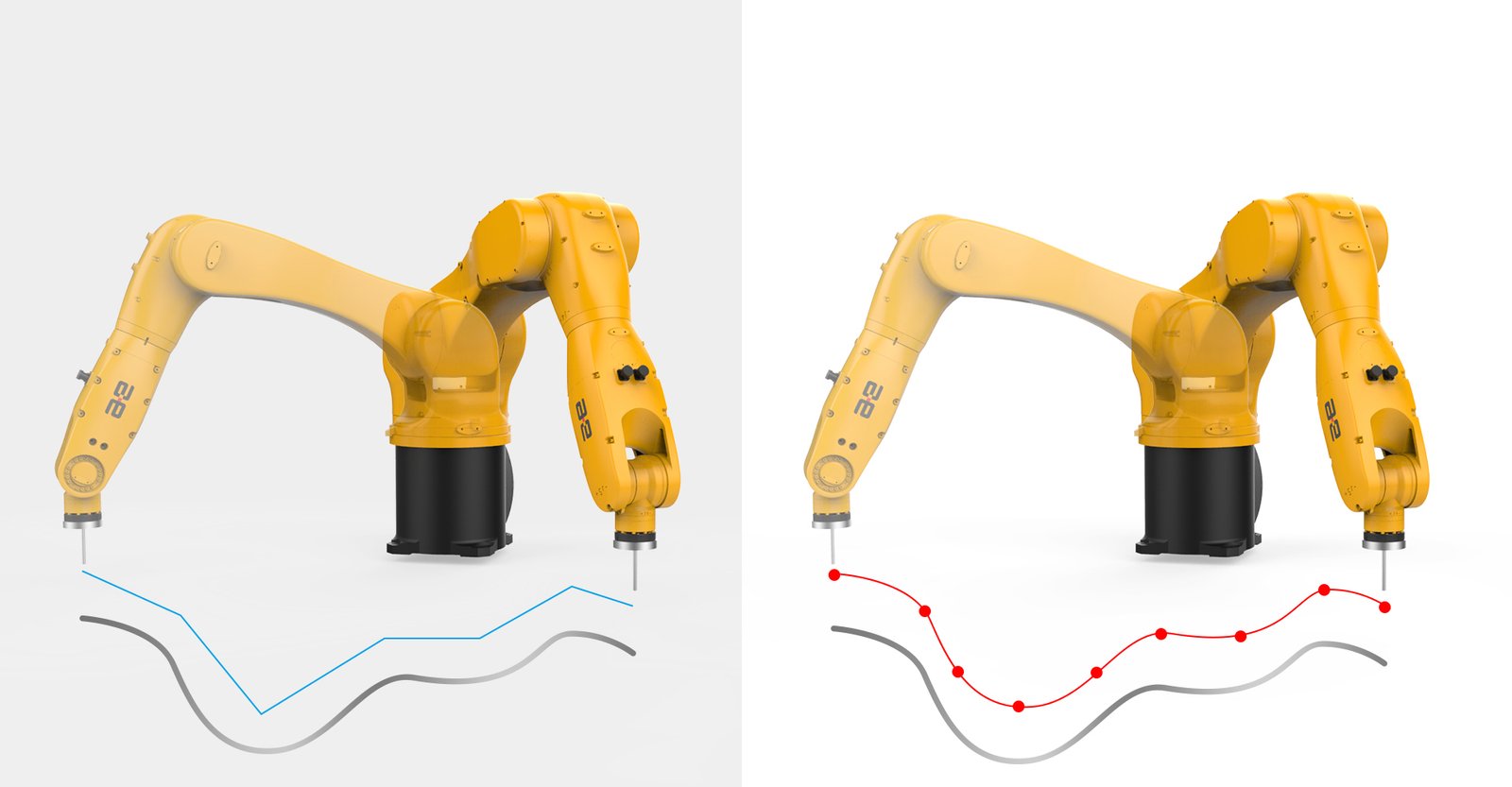
B-spline Trajectory
It can resolve the problem of high workload and low fitting precision when using a straight line and an arc to fit the curves of various shapes.
A total of 1 page 1 data